|
1. ■GPS의 개발경위 및 시스템 구성과 궤도
■ GPS란 무엇인가
 사방을 둘러봐도 수평선뿐인 망망한 바다를 항해하는 선박이 현재 위치를 알기 위하여 오래 전부터 이용해 온 방법은 맑은 밤하늘에 빛나는 성좌의 방위을 관측하여 항로를 정하는 것이었다. 이 방법을 천문항법이라 부르는데, 현재도 이용되고 있지만, 주야 구별없이 또 기상조건의 영향을 받지 않는 로란, 데카, 오메가 등의 전파항법이 널리 이용되고 있다. 이러한 시스템은 육상에 설치된 복수의 송신국으로 부터 전파를 수신해서 거리를 구하여 현재의 위치를 파악하는 것으로(측위라고 한다), 쌍곡선 항법이라고도 부른다. 그리고 현재까지의 항법 시스템과는 비교도 되지 않을 정도의 정확성으로(오차 ±수십 m) 지구상의 어느 곳에서도 이용할 수 있는 인공위성을 이용한 항법 시스템이 널리 이용되고 있다. 사방을 둘러봐도 수평선뿐인 망망한 바다를 항해하는 선박이 현재 위치를 알기 위하여 오래 전부터 이용해 온 방법은 맑은 밤하늘에 빛나는 성좌의 방위을 관측하여 항로를 정하는 것이었다. 이 방법을 천문항법이라 부르는데, 현재도 이용되고 있지만, 주야 구별없이 또 기상조건의 영향을 받지 않는 로란, 데카, 오메가 등의 전파항법이 널리 이용되고 있다. 이러한 시스템은 육상에 설치된 복수의 송신국으로 부터 전파를 수신해서 거리를 구하여 현재의 위치를 파악하는 것으로(측위라고 한다), 쌍곡선 항법이라고도 부른다. 그리고 현재까지의 항법 시스템과는 비교도 되지 않을 정도의 정확성으로(오차 ±수십 m) 지구상의 어느 곳에서도 이용할 수 있는 인공위성을 이용한 항법 시스템이 널리 이용되고 있다.
GPS(Global Positioning System)는 미 국방성에서 개발한 것을 위성을 이용하여 위치, 속도 및 시간측정 서비스를 제공하는 시스템이다. GPS는 3차원 위치, 고도 및 시간의 정확한 측정을 할 수 있고, 24시간 연속적으로 서비스를 제공할 수 있으며, 기상조건, 간섭 및 방해에 강하고, 전세계적인 공통 좌표계를 사용한다는 특징이 있다. 지금까지 20년 이상 오랜 세월에 걸쳐 개발하고 있는 GPS는 지구의 주위를 선회하는 24개의 인공위성과 5개소의 감시국, 그리고 제어국으로 구성된다. 유저는 종래의 전파항법 시스템과 마찬가지로 전용의 수신기를 설치하는 것만으로 정확한 위치를 알 수 있는 것이다.
 원래 군사 목적으로 개발된 GPS 위성으로부터는 표준 측위와 고확도 측위를 목적으로 두 종류의 신호가 발사되고 있다. 즉 표준측위서비스(SPS:Standard Positioning System)와 정밀측위서비스(PPS:Precise Positioning System)로 나누어지는데, SPS는 민간이라도 이용할 수 있도록 개방한 서비스이며, PPS는 주로 군사 부문의 용도에 사용된다. SPS는 앞서 언급한 선박뿐만 아니라 항공기, 그리고 나중에 소개하는 자동차 내비게이션 시스템과 같이 자동차에도 탑재됨에 따라 지금까지 실현할 수 없었던 새로운 응용의 길을 터놓았다. 이에 따라 각 일렉트로닉스 메이커와 자동차 생산 회사를 비롯한 여러 회사에서 GPS 수신기와 응용 제품을 개발하여 선보이고 있다. 이들 제품의 일례도 나중에 소개 하기로 한다. 원래 군사 목적으로 개발된 GPS 위성으로부터는 표준 측위와 고확도 측위를 목적으로 두 종류의 신호가 발사되고 있다. 즉 표준측위서비스(SPS:Standard Positioning System)와 정밀측위서비스(PPS:Precise Positioning System)로 나누어지는데, SPS는 민간이라도 이용할 수 있도록 개방한 서비스이며, PPS는 주로 군사 부문의 용도에 사용된다. SPS는 앞서 언급한 선박뿐만 아니라 항공기, 그리고 나중에 소개하는 자동차 내비게이션 시스템과 같이 자동차에도 탑재됨에 따라 지금까지 실현할 수 없었던 새로운 응용의 길을 터놓았다. 이에 따라 각 일렉트로닉스 메이커와 자동차 생산 회사를 비롯한 여러 회사에서 GPS 수신기와 응용 제품을 개발하여 선보이고 있다. 이들 제품의 일례도 나중에 소개 하기로 한다.
GPS는 원리가 매우 간단하나 응용 분야는 광범위하며, 크게 나누면 다음과 같다.
지상운송: 첨단 교통관제, 여행자 정보 시스템
해상운송: 선박항해
항공운송: 첨단 항공관제
군사: 군용기 항법, 유도무기, 정밀폭격, 정찰
응급, 구조: 구급차, 경찰 순찰차, 정찰
과학: 기상 연구, 해류 연구, 대류층 연구, 지각운동 연구
우주: 위성의 위치 및 시간정보 제공
■ GPS의 개발 경위와 시스템 구성
Cafe 상세 참조
■ GPS 위성의 궤도
Cafe 상세 내용 참조
2. GPS의 측위원리와 수신 시스템
■ GPS의 측위 원리
GPS에 의한 측위는 위성으로부터 발사되는 전파의 지연시간을 계측하고 궤도로부터의 거리에서 현재의 위치를 구하는 방법이다. 우측 그림에 3개의 위성에 의한 원리를 나타냈는데, 하나의 위성으로부터의 거리를 알면 현재의 위치는 위성을 중심으로 하여 반경이 그 위성으로부터의 거리로 되는 구(球)의 표면의 어느 곳으로 된다. 이것에 또 하나의 위성으로부터의 거리를 알면 현재의 위치는 두 구가 서로 겹치는 원주상의 어느 곳으로 된다. 그리고 3번째 위성으로부터의 거리에 의해 그 구와 이 원의 두 교점에서 어느 한 곳으로 된다.
Cafe 상세 내용 참조

좀더 알기 쉽게 설명하기로 한다.
Cafe 상세 내용 참조
■ GPS 위성의 송신신호
GPS 위성으로는 실험용의 블록Ⅰ과 실용위성인 블록Ⅱ, 그리고 그 후속기인 블록Ⅲ이 있다. 블록 Ⅱ의 위성은 수명이 약 7년 반 정도로 설계되어 있었다. 일반적으로 위성의 수명을 결정하는 것은 궤도 수정을 하기 위해 필요한 연료를 어느 정도 탑재하는가에 달려 있다. 궤도상의 위성에 연료를 보급하는 것은 그리 쉬운 일이 아니며, 발사 단계에서 탑재할 필요가 있다. 그리고 이 GPS 위성에는 원자시계가 탑재되어 있으며, 이것의 수명도 그다지 길지 않다.즉 1989년에 발사된 블록 Ⅱ의 위성은 1997년에는 수명이 다하여 사용할 수 없게 됨에 따라 새로운 위성이 필요하게 되었는데, 이것이 블록Ⅲ이다.
Cafe 상세 내용 참조
Cafe 상세 내용 참조
위성으로부터 정보를 수신하기 위해서는 각 위성의 고유 코드를 수신기가 해독하고 있을 필요가 있다. 표준 측위용으로 사용되고 있는 것이 C/A 코드(공개되어 있다)라 부르는 것으로, 이것은 고확도 측위에서 사용되는 P코드(비밀)를 보정하는 데에도 사용된다. C/A란 Clean and Acquisition 또는 Coarce and Acquisition의 약자이며, P는 Precision 또는 Protect의 의미이다.
Cafe 상세 내용 참조
3. GPS 수신 안테나와 수신장치의 구성
■ GPS 수신 안테나
 GPS에 의한 측위를 하려면 동시에 4개의 위성으로부터 전파를 수신해야 한다. 인공위성이라 하면 패러보릭 안테나를 연상하겠지만, GPS의 경우에는 여러 위성, 그것도 지구의 주위를 돌고 있으므로 패러보릭 안테나와 같은 지향성이 강하고 또 이득이 큰 안테나를 사용할 수 없다. GPS에 의한 측위를 하려면 동시에 4개의 위성으로부터 전파를 수신해야 한다. 인공위성이라 하면 패러보릭 안테나를 연상하겠지만, GPS의 경우에는 여러 위성, 그것도 지구의 주위를 돌고 있으므로 패러보릭 안테나와 같은 지향성이 강하고 또 이득이 큰 안테나를 사용할 수 없다.
GPS 수신기에서 사용되는 안테나는 여러 종류가 있는데, 이들은 그라운드 플레인의 상측에 반원 형태의 지향성을 가지며, 위성으로부터 송신되는 우선원(右旋圓) 편파를 수신하는 것이다. 측량용의 수신기에서는 직교 다이폴 안테나나 헤리컬 안테나, 선박용으로는 헤리컬 안테나가 사용되고 있는 것 같다. 또 돌기물을 꺼리는 항공기나 자동차에는 마이크로스트립 안테나가 사용된다.
Cafe 상세 내용 참조
■ 일반적인 GPS 수신 안테나의 사양
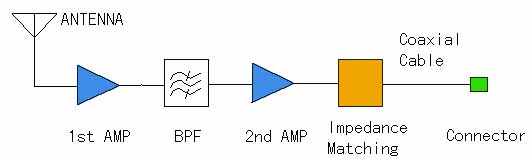
GPS 안테나는 GPS 위성으로부터 보내져 오는 미약한 신호를 증폭하기 위해, 안테나 소자 바로 밑에 20~40dB 정도 증폭하는 저잡음 앰프를 필요로 한다. 앰프의 전원은 GPS 수신기로부터 동축 케이블에 실어 공급한다.
Cafe 상세 내용 참조
■ 일반적인 GPS 안테나의 블록도
■ GPS 수신장치의 구성
현재 입수할 수 있는 수신기로는 선박, 항공기, 자동차 등의 이동체의 위치를 인식하기 위한 것과 고확도로 거리를 측정하기 위한 측량용이 있으며, 최근에는 등산, 여행용 초소형 수신기, GPS 수신장치와 손목시계를 결합한 제품도 등장했다.
수신기의 내부구성은 메이커에 따라, 그리고 용도에 따라 상당히 차이가 있는 것 같다. 측위 그 자체는 수신기에 내장한 마이크로컴퓨터에 의해 이루어지며, 그 프로그램에 따라서도 측위의 확도가 상당히 달라지는 것 같다. 여기서는 GPS 수신장치의 기본적인 구성과 원리에 대하여 설명한다.
GPS의 수신기는 아래 그림 "GPS 수신기의 구성"에 나타낸 바와 같이 크게 나누어 3개의 블록으로 구성되어 있다. 고주파부는 안테나로 수신한 1.2 또는 1. 5GHz의 신호를 취급하기 쉬운 낮은 주파수로 변환한다. 다음의 신호처리부에서는 스펙트럼 확산을 원래대로 복원시키는 역확산을 하여, 위성으로부터 보내져 오는 메시지와 의사거리를 얻는다. 마이크로컴퓨터부에서는 신호처리부로부터 얻어진 메시지와 의사거리에서 현재의 위치를 구하는 연산을 한다.
GPS 수신기 구성
Cafe 상세 내용 참조
GPS 수신기의 내부는 일반 통신기기의 구조보다 상당히 복잡하다. 주파수 변환이나 중간주파증폭 등 이미 잘 알고 있는 부분도 있지만, 그것은 GPS 수신기의 아주 일부분에 지나지 않는다. 위성을 포착하거나 위치를 신출하는데 있어서 중요한 역할을 하고 있는 것이 마이크로컴퓨터이며, 어느 메이커의 수신기에서도 예외없이 16비트 이상의 처리 능력을 가진 것이 사용되고 있다.
신호처리부는 위성으로부터의 신호와 수신기 내부에서 발생한 PRN 코드의 발생을 신호처리부에 지시한다.
신호의 동기를 얻는 하나의 방법으로 아래 그림 "딜레이 로크루프에 의한 동기"에 나타낸 딜레이 로크 루프가 있다. 이것은 수신신호와 수신기 내부에서 발생한 PRN 코드가 완전히 일치하고 있으면 이들 신호를 평형변조기(믹서)에서 적산했을 때의 출력에 포함되는 반송파 주파수 성분이 최대가 되는 것을 이용하고 있다.
그림에 나타낸 바와 같이 3개의 믹서에는 각각 1/2 클록의 시간차가 있는 PRN 코드가 입력되고 밴드패스 필터와 검파기에 의해 믹서의 출력에 포함된 반송파 주파수 성분을 검출하도록 되어 있다. 이 회로는 상대적으로 1클록의 시간차가 있는 PRN 코드에 의한 반송파 주파수 성분이 같아지는 VCO(전압제어 발진기)를 제어한다.
즉, 의사거리와 그림에 나타낸 PRN 코드는 완전히 입력신호의 것과 일치하고, 이것과 입력신호를 적산한 출력에는 50bps의 메시지로 변조(PSK)된 신호가 나타난다. 의사거리는 수신신호와 일치한 PTN 코드이다. 이것과 수신기 내부의 기준신호(시계)와의 시간차가 의사거리로 취급된다.
딜레이루프에 의한 동기
Cafe 상세 내용 참조
GPS에 의한 측위는 동시에 3개 또는 4개의 위성으로부터의 의사거리가 필요하게 된다. 각각의 위성에는 다른 PRN 코드가 할당되어 있다. 즉, 수신기에서는 수신하는 위성의 수와 같은 정도의 신호처리부를 가질 필요가 있다.
가장 단순한 수신기로는 신호처리 회로가 하나 뿐인 1채널 수신기가 있다. 또 측량용의 수신기 가운데는 10채널이나 12채널로 된 것도 있다. 아래 그림 "채널수에 의한 수신기의 분류"는 이미 발표된 수신기를 탑재되어 있는 채널수로 분류한 것이다.
|
채 널 수 |
구 성 |
동 작 |
|
1채널 |

|
시분할로 4~5개의 위성을 추미한다
저가격의 수신기에 사용되고 있다. |
|
2~4채널 |
|
하나의 채널로 가장 높은 위성을 포착하면서 나머지 채널을 시분할로 사용하며, 합계 4~5개의 수신을 한다. |
|
5채널 이상 |
|
채널을 각각의 위성 전용으로 사용한다
고급 수신기에 사용되고 있다. |
기본적으로 1채널 수신기는 수신해야 할 위성의 PRN 코드를 순차 전환시켜 포착하여 각 위성에 대한 의사거리를 구한다. 회로가 아주 간단하고 소비전력도 적다는 등의 특징이 있다. 그러나 각 위성에 대한 의사거리의 동시성(同時性) 확보가 곤란하여 고속으로 이동하는 경우에 정보를 얻지 못할 가능성이 있다.
2채널부터 4채널 수신기에서는 하나의 채널을 가장 감도가 높은 위성 전용으로 사용하고, 남은 채널을 시분할하여 나머지 위성을 포착한다. 1채널 수신기보다는 복잡하게 되지만 다음에 설명하는 멀티채널 수신기보다는 간단하며, 또한 소형으로 되는 특징이 있다.
5채널 이상의 수신기로 되면 신호처리 회로를 각각의 위성 전용으로 사용한다. 측위에는 4개의 위성으로 충분하지만 다음에 이용할 수 있는 위성을 포착하기 위해 5번째 이후의 채널이 사용된다. 채널수가 많을수록 자유로이 위성을 조합할 수 있어 확도가 높은 측위가 가능하다.
이와 같이 GPS 수신기에는 몇가지 종류가 있으며, 각각 장단점이 있다. 측위의 성능에 대해서만 생각하면 가장 우수한 것이 다채널 수신기이지만 실제로는 소비전력이나 크기, 측위의 갱신시간, 그리고 가격 등 용도에 따라 가장 적합한 수신기의 구성을 선택할 필요가 있다.
자동차나 선박 등에서는 소형으로 소비전력이 적으며, 저가격인 수신기가 요구되는 경우가 적지 않다. 이와 같은 분야에서는 채널수가 적은 시분할형의 수신기가 적합할 것으로 생각된다. 이 시분할에는 고속으로 위성을 전환하는 멀티플렉스형과 그보다도 저속으로 전환하는 시퀀셜형이 있다.
지금까지 간단히 GPS 수신기의 구성을 설명하였는데, 측위의 확도는 탑재되어 있는 마이크로컴퓨터의 프로그램에 의해 크게 좌우된다. 이 내용에 대해서는 각 사가 모두 비밀로 하고 있으며, 공개되어 있지 않다. 또한 여기서 소개한 것 이외에도 여러 종류의 수신방식이 개발되고 있으며, 그 내용에 대해서도 발표되고 있지 않다. 따라서 현 시점에서는 한정된 메이커가 독자적인 기술을 구사하여 수신기를 개발하고 있는 실정이다.
■ 일반적인 GPS 수신기의 사양
Cafe 상세 내용 참조
■ 일반적인 GPS 수신기의 블록도
|